A Thread Debug Interface (TDI)
for Implementations of
the POSIX Threads (Pthreads) Standard
TDI-Introduction
Pthread Libraries, a modified GDB)
Installation Details
Give us Feedback
TDI Introduction
Thread debugging with common debuggers is very uncomfortable if the
debugger is not thread aware. There are a few solutions for that problem,
most of them are based on the GDB (GNU Debugger). The common disadvantage
of them is the specialization to a specific thread implementation. The
POSIX standard for a C multithread programming interface offers the possibility
to design a common debug interface for standard compliant implementations.
The TDI is an approach to provide such an interface for the ,,whole" variety
of POSIX threads implementations. This includes kernel thread implementations
(Linuxthreads) as well as pure user space solutions (FSU Pthreads, MIT
Pthreads).
The TDI is an abstraction layer between the SE tool debugger and the
programming environment POSIX threads. Normaly neither the debugger is
thread aware nor the Pthreads package provides debugging support. There
are several approaches to get debugging support for Pthreads. One distinction
is done by looking at the implementations behaviour while debugging it.
The first alternative is a passive role while debugging. This requires
a vast amount of decoding and symbol lookup on the debugger side and decreases
the portability. All informations about threads and related informations
have to be retreived by the debugger. The advantage is that there are no
changes to the implementation beside the compilation with ,,-g". A much
greater disadvantage is the coding effort necessary on the debugger side.
Furthermore the debugger has to be updated for every Pthreads change, because
the decoding stuff has to be updated.
The TDI uses the second approach to get debugging support. Using the
Pthreads implementation as a server for thread related informations offers
the possibility to provide a kind of abstract pthreads implementation interface
by every specific implementation. In consequence the debugger only has
to know how to debug an abstract pthread implementation. This makes the
debugger independent to the Pthreads development. The TDI core embodies
the debugger and pthreads independent part of thread debugging. It provides
communication support for both the server side (pthreads) and the client
(debugger). The TDI manages the query requested by the debugger, evalutes
it by utilizing the abstract pthread implementation interface of the pthread
implementation.
To get an experience of how the TDI is embedded into the debugging environment
take a look at the following picture.
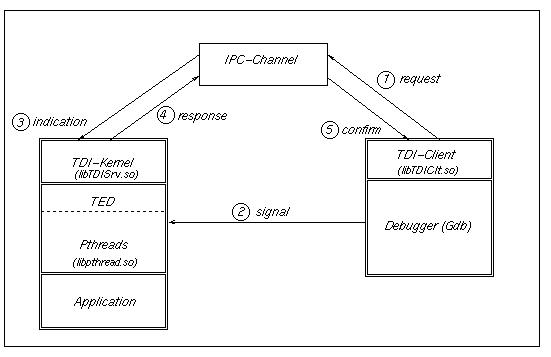
Mainly the TDI is an information server. We can consider every Pthreads
Implementation as a dynamic database. Actually we have only three relations
- Threads, Mutexes and CV's. The attributes are mentioned above. To access
the data base easier a simple query system was developed.
TDI Perspectives
-
Because the TDI is an interface it offers different possibilities to look
at. The interesting views to the TDI are decsribed below.
User View
-
The level of visibility of the TDI for the user depends on the debugger
implementation. The TDI provides a query language to get information about
threads, mutexes and condition variables. If the debugger implements a
command to access that TDI facility directly, the user is able to use it.
In addition the debugger could transform symbol names into address values
(used by the TDI) to get a user friendly query interface (names vs. addresses).
-
An Example:
-
User question: Which threads are blocked on
a mutex with a priority of greater than 20 ?
-
TDI-Query: ,,<TED>thread: id,prio,state,function,function_arg:
status==0x2 && prio>0x20"
Debugger(Gdb) View
-
The development of a portable debugger is a hard work which is shown impressive
by the Gdb implementation. One aim of the TDI was to not increase the complexity
of the Gdb. Instead the TDI is a bit more complex than the TDI access by
the Gdb. All Gdb access to the TDI is done by sending ASCII-sequences (human
readable) to the TDI and receiving results in a defined format. For example
a response to the above shown query example could be ,,1 2f 2 805b000 805bc28#2
21 2 805c000 805cc28". According to the request this response should be
processed by the debugger to get a readable result. The debugger could
resolve the function and function_arg address to symbol names, because
the TDI can not be aware of symbol names.
Pthreads View
-
The Pthread Implementation has to provide the functions necessary to embody
the abstract pthread implementation interface. For every kind of entity
(threads, mutexes, CV's) there have to be attribute access functions. There
is not much effort necessary to implement them. This should be an incentive
for pthread developers to add that extension. The Pthread implementation
can not see anything of the TDI. The TDI-Server is linked to the Pthreads-Library
(there is a library linked for pthread support either a library implementation
or a kernel thread package is used) at runtime (shared library support
is necessary).
What does the TDI ?
-
The TDI is an interface between the Debugger and the Pthreads implementation,
that provides an application view for the debugger on a pthreads abstraction
level. For short, the TDI makes all POSIX Objects and their relationshpis
at runtime visible. This information can be used by the debugger to provide
low and high level thread debugging.
POSIX Objects
-
If one imagines the POSIX Threads API as a world of objects, the following
interesting objects could be noticed:
-
Threads: ~ are an abstraction for concurrent (or parallel on multiprocessors)
control flow. They are associated with a start function they execute. Threads
can have many attributes which should be accessible for the debugger. Because
the standard only defines the name for the thread type (pthread_t), the
implementation solely knows how to access the thread attributes.
-
interesting attributes: ID, address (of the pthread_t object), priority,
start function address , function argument address, status (RUNNING,READY,BLOCKED[Mutex,Condition
Variable,Other Reason (IO,timer)],EXITING)
-
methods (thread related c-functions): init,create,exit
-
Mutexes: ~ are a mean for thread synchronisation. The type name pthread_mutex_t
is defined but not the type itself.
-
interesting attributes: ID,address (of the pthread_mutex_t object), owner
-
methods: init,lock,unlock,destroy
-
Condition Variables: ~ are used to signal blocked threads. CV's establish
a per mutex signalling system.
-
interesting attributes: ID, address (of the pthread_cond_t object), associated
mutex
-
methods: init,wait,timed_wait,signal,broadcast,destroy
-
TDI Architecture
-
The TDI-kernel consists of three components:
-
query processing (parsing, evaluation)
-
bookkeeping and auxiliary functions
Communication Module
-
The communication is implemented using the SVR4 shared memory facility.
The communication module is designed modular to add any other kind of IPC.
Query Transformation
Every query consists of three parts:
-
set addressing (threads, mutexes or condition variables)
-
attribute selection (projection) and assignment
Syntactic and semantic checks are done by a precompiler. The precompiler
generates a list of visible attributes, a list of assigned attributes.
Query Processing
If the query passes the precompiler without error, the second stage is
the per tupel interpreter. The per tupel interpreter evaluates the boolean
select expression for every tupel. If the boolean expression can be evaluated
as true, the projected attributes of that tupel can be added to the query
result.To evaluate the select expression, the tupel interpreter uses the
functions provided by the TED.
Auxiliary Functions
The TDI provides some auxiliary functions for:
-
object registration (object containers for POSIX objects not administrated
by the Pthreads implementation)
-
persistent ID support (process persistent Thread-ID's)
-
registering of the TED functions
Because not all POSIX threads objects are administrated by the pthreads
implementation, the TDI provides object containers for them. Mutexes and
condition variables are handled by the user and not by the pthreads implementation.
To keep track of the object sets, the pthread implementationhas to use
the object container functions of the TDI to register an object (at pthread_create
or pthread_mutex_init) at creation time and unregister it at destruction
(pthread_exit or pthread_cond_destroy).
The data type of POSIX threads is pthread_t. If pthread_t is defined
as a pointer to an internal thread structure, persistent thread ID's can
not guaranteed. If the pthreads implementation uses the TDI object container
functions, process persistent ID's can be realized by assigning an new
ID to every new container element.
It was a design goal of the TDI to allow debugging support for pthread
implementations with an incomplete TED implementation. This is necessary,
because some functionality can not be supported by both kernel and user
space implementations. To illustrate this design goal see the thread attribute
state.If
a multithreaded kernel thread based application is stopped while debuggung
it, all kernel threads have the state (TRACED), even the running thread
that caused the breakpoint. If it's impossible to get the state of the
kernel threads they had just before stopping them, no read and write functions
for the state attribute are registered at the TDI kernel. If the user or
debugger makes a query request including the state attribute, the NULL-value
is returned for state, because no read and write functions are registered.
Feedback
You're welcome to make any suggestions and tell us your ideas. Please
direct all TDI questions and bug reports to
tdi-bugs@informatik.hu-berlin.de
| Last Modified: 1999-Apr-25 |
|