This example shows how task dependency is used in a two stage pipeline application. The problem is a simple simulation.

- The first stage generates random numbers using a pseudo random number generator
- The second stage simulates the movements
For this problem, each simulation step only needs a small amount of data just as a motion vector. Although ALF does not have a strict limit on how small the data can be, it is better to use larger data blocks for performance considerations. Therefore, the data for thousands of simulation steps is grouped into a single work block.
Sn=(Sn-j^Sn-k)%232where k > n > 0 and k = 71, j = 65
The algorithm requires a length k history buffer to save the older values. In this implementation, the task context is used for the history buffer. Because no input data is needed, the work block for this task only has output data.
Stage 2 task: For the stage 2 task, the task context is used to save the current status of the simulation including the position of the object and the number of hits to the walls. The work block in this stage only has input data, which are the PRNG results from stage 1.
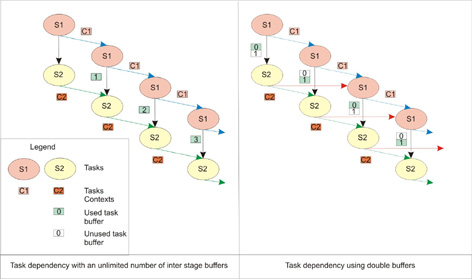
Another target of pipelining is to overlap the execution of different stages for performance improvement. However, this requires work block level task synchronization between stages, and this is not yet supported by ALF. The alternative approach is to use multiple tasks whereby each task only handles a percentage of the work blocks for the whole simulation.
- The stage 1 task generates the random numbers and writes out the results to a temporary buffer
- The stage 2 task reads the random numbers from the temporary buffer to do the simulation
A task dependency is set between the two tasks to make sure the stage 2 task can get the correct results from stage 1 task. Because both the PRNG and the simulation have internal states, you have to pass the states data between the succeeding tasks of the same stage to preserve the states. The approach described here lets the tasks for the same stage share the same task context buffer. Dependencies are used to make sure the tasks access the shared task context in the correct order.