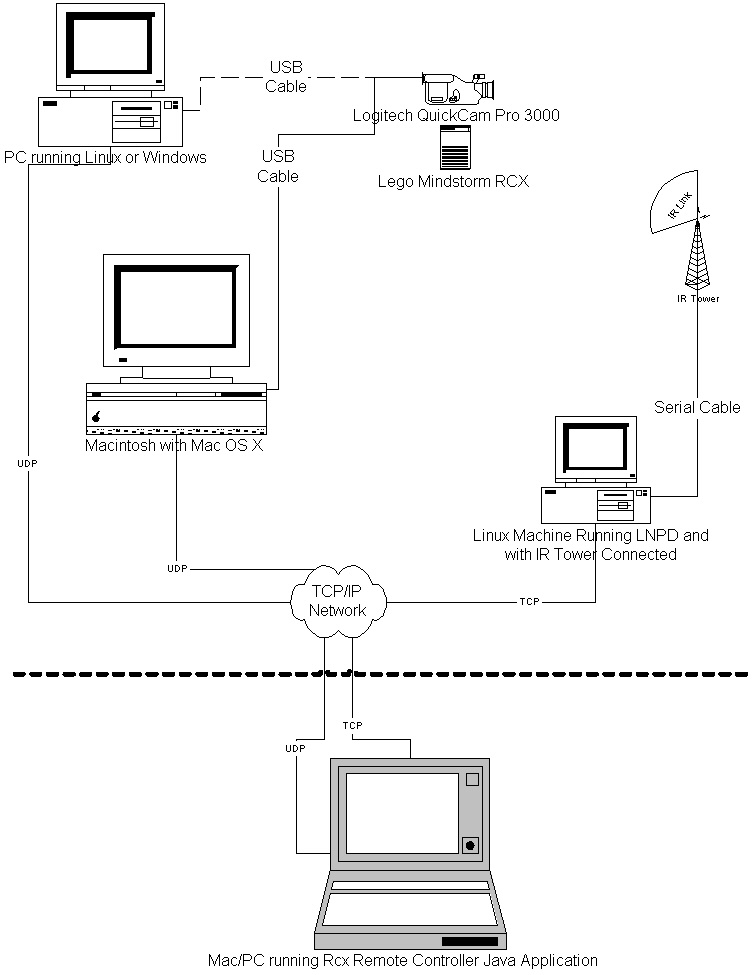
- The overall system architecture is as the following:
- We successfully connected a Logitech QuickCam Pro 3000 to Apple Macintosh PowerMac and iBook.
- After installed QuickCam Pro driver for Mac OS X from http://webcam-osx.sourceforge.net/,
I downloaded the QuickTime for Java SDK from http://developer.apple.com/sdk/index.html#QTJava.
I changed SGCapture2Disk example so that that the SGCapture application
will send captured JPEG data via UDP to the Rcx Remote Controller Java Application
while storing the data to the disk as a QuickTime movie at the same time.
Please see the following screen shot.

- Note: I didn't try to install the QT for Java on Windows machine.
It may work.
- Then I started the Java Remote Controller application and start
the SGCapture2Disk
recording so that the SGCapture2Disk Java application will send the data via UDP to the remote controller. We successfully received the compressed JPEG data and display correctly at 5 frame/second at 160x120 resolution. Please see the following screen shot.